라즈베리파이를 이용한 자율주행 로봇을 제작할 것이다.
하드웨어의 구조적인 목표는 옴니휠 3개를 이용하여 홀로노믹 움직임을 구현하는 것이다.
하드웨어는 손바닥에 올릴 수 있는, 손바닥 크기와 비슷한 로봇을 만들 것이다.
자율주행을 하면서 주변 환경을 인식하고, 실시간으로 맵으로 변환 및 저장하는 것이 목표이기 때문에 엔코더가 장착된 기어드 모터를 사용하였다.


알리익스프레서에서 12V 엔코더가 장착된 마이크로 기어드 모터를 구입하였다.
모터의 스펙은 12V 190RPM, 5Kgcm(Rated) / 9Kgcm(Stall) 의 스펙을 가지는 무지막지한 녀석이다.
해당 모터를 모델링하여 추후 프레임 제작 모델링에 사용할 것이다.



모터를 구입했으니 프레임에 고정할 수 있도록 브라켓을 세트로 구입하였다.



58mm 옴니휠을 주문하고, 이 역시 추루 프레임 제작 모델링에 사용하기 위해 모델링하였다.




그리고 옴니휠과 기어드 모터를 연결할 커플링을 구입하였다. 구입한 모터는 4Pi 크기의 샤프트를 내장하고 있어 4Pi 크기의 스펙을 구입하였다. 이 역시 모델링했다.

앞서 모델링한 부품들을 조립하여 대략적인 크기와 형태를 잡아서 모델링하였다.

그리고 밑판과 상판을 설계하고, 35mm 서포트를 사용하여 고정하였다.

라즈베리파이를 10mm 서포트를 사용하여 고정하였다. 라즈베리파이는 3B+ 모델을 사용하였다.

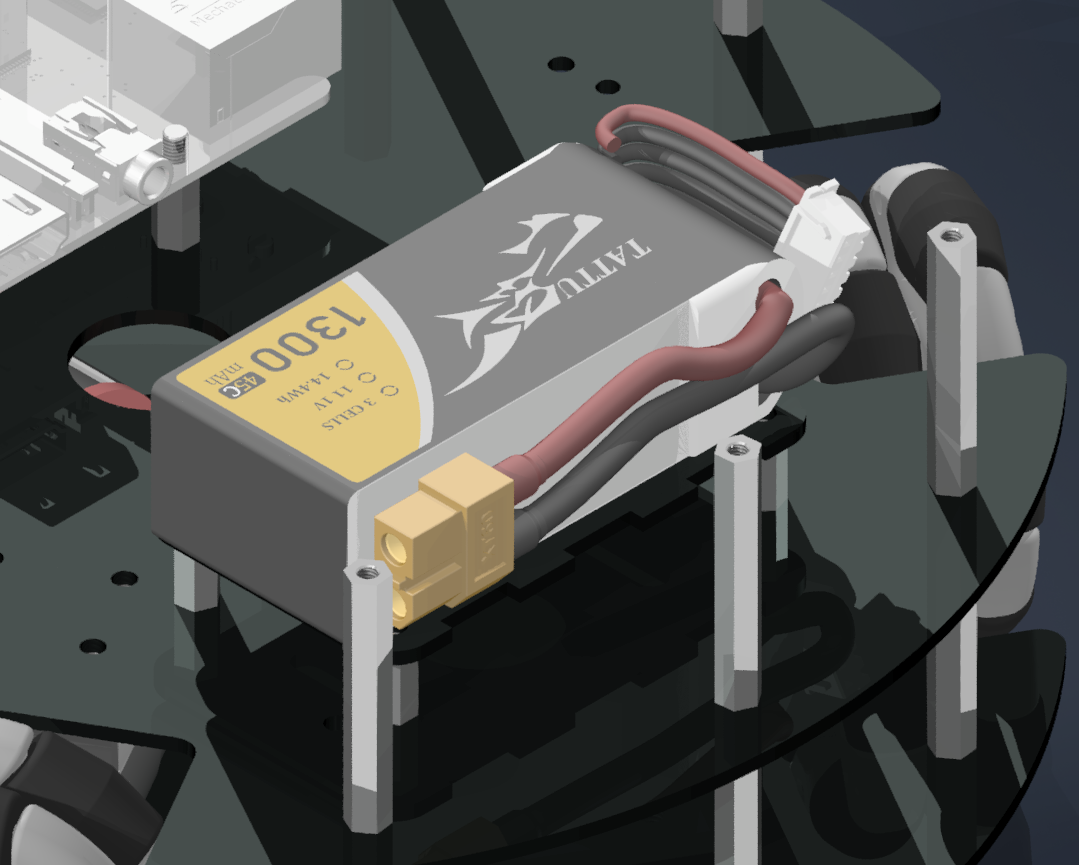
배터리는 모터, 케이블, 회로 등에 걸리적거려 영향을 줄 수 있기 때문에 배터리를 고정하는 프레임을 따로 제작하였다.
배터리는 모델링에서는 1300mAh 기준이지만 실제로는 2200mAh 또는 5200mAh를 사용할 예정이다.

마지막 상판을 올려 라이다 센서와 전원 스위치를 장착하였다.
라이다 모델링 파일은 제조회사에서 공개한 모델링 파일이다.

최종 모델링 모습이다. 모델링에 적용된 프레임은 아크릴 2T or 3T로 가공하여 조립할 것이다.
첫 구현 목표는 메카넘 휠의 모든 엔코더 값을 읽고 레이더의 값을 라즈베리파이와 통신하는 것이다.
추가로 자이로센서를 통해 현재 로봇의 속도, 각가속도 등을 계산할 것이다.
가능하다면 카메라를 장착해 OpenCV 등의 카메라 제어 또한 해볼 것이다.
- 구현목표 -
1. 모터제어 및 자이로센서 컨트롤
2. 모든 하드웨어를 장착해 컴퓨터와 통신
3. 주변환경을 파악해 길찾기 알고리즘을 통해 주행
4. 맵을 저장하여 주행하여 컴퓨터와 맵 이미지 연동하기
5. 저장된 맵 데이터와 로봇의 현쟁 위치를 결합해 안정성이 높고 효율적인 위치탐색 기능을 공부
'프로젝트 (Project) > 자율주행로봇 (SLAM)' 카테고리의 다른 글
| 3. 모듈형 드라이버 쉴드 보드 제작 (5) | 2022.01.09 |
|---|---|
| 2. 하드웨어 설계 및 조립 (2) | 2021.08.28 |

